Designing tailored vacuum gripping solutions in just a few clicks
The challenge
Manual design of vacuum gripping systems has historically been time-consuming and specialized, resulting in inflexibility and generic solutions that fail to address the varied and changing requirements of automated industrial operations.
The outcome
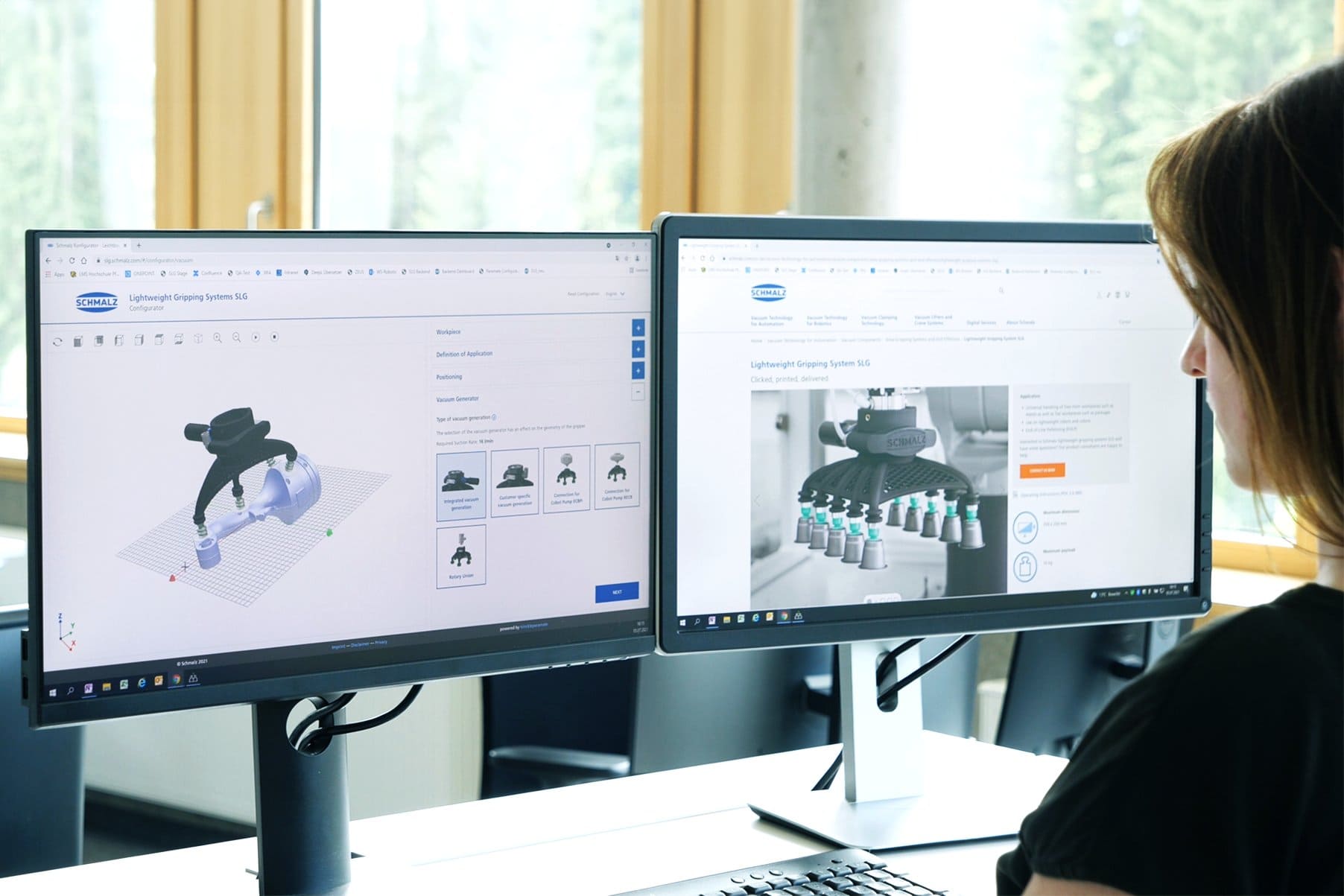
Leveraging trinckle's paramate cloud technology, J. Schmalz GmbH now delivers a revolutionary online platform for users to effortlessly design and order a 100% customized vacuum gripping system, optimized for their specific handling tasks.
With intuitive configuration, real-time CAD model generation, and the power of 3D printing, it's now possible to design a bespoke gripper ready in ten minutes, eliminating manual design costs and embracing the demand for tailored solutions in the era of automation.